






NEWS
新着情報
『トンネル覆工セントル用磁力吸着走行機』を開発
2021年12月10日
佐藤工業は、東海大学情報理工学部コンピュータ応用工学科の稲垣克彦教授と共同で、トンネル覆工用セントルのスキンプレート曲面上を自在に走行可能な『トンネル覆工セントル用磁力吸着走行機』を開発しました。この走行機をベースマシンとして、覆工の各種作業のロボット化を推進しています。 ロボット化を図る主な作業としては、打設前点検、打設前巻き厚検測、打込み中の締固め作業、レーザー測定器搭載による打込み面形状監視、打込み中のリアルタイム動画撮影による施工管理や記録等があげられます。自己充填覆工構築システム、出来形マイスターなどの当社保有技術とともに、トンネル覆工の省力化を進めています。なお、同走行機はこれまでも「けんせつフェア」等に出展しており、2021年12月14・15日に開催される『建設技術フェア2021 in 中部』にも出展の予定です。
1.開発の背景:山岳トンネルの覆工コンクリート打設は、地山とセントル外周面との間(30㎝程度)の狭い曲面状の空間で行われています。そして、コンクリート打設作業や巻き厚検測などは、セントルに設置されている検査窓より行われます。限られた窓からの作業は、狭い曲面状であるため視認が困難となり、また狭いセントル内での重い窓の開閉作業は労力を要し危険が伴うため、窓数ひいては開閉回数は、作業性と安全性に大きく影響します。このような背景から、狭い空間のセントル外面上を自在に移動できる走行機を用いて、検査窓を介する各種作業の省力化を図りロボット化することを目的とし、セントルのスキンプレート曲面上を磁力で吸着して走行する『トンネル覆工セントル用磁力吸着走行機』を開発しました。
2.磁力吸着走行機の概要:走行面に磁力で吸着する2組(4輪)の車輪の各輪に取り付けたタイミングベルトを介して、4基のDCモータにより能動駆動します。4輪は超信地旋回(その場で旋回すること)が可能なように配置し、また4つの車輪はセントルスキンプレート曲面に接地するように能動的に回転する構造としています。機体は、無線接続されたジョイスティックで遠隔操作を行い、ジョイスティックからの操作指示を受けた機体のマイクロコントローラより各DCモータへ速度指示が送られ、各輪が適切な回転数で駆動します。
3.走行テストの内容と結果:屋外で実施した実機セントルでの走行テストの結果、セントル延長方向・円周方向走行時ともに、走行機の落下や剥離剤塗布面上のスリップなどは認められず、安定した走行性が確認されました。また、トンネル覆工における観察、監視(カメラ等)、検査、測定(測定器等)、各種作業(バイブレーター操作等)などをロボット化するためのベースマシンとしての有効性が確認されました。
4.実用化に向けた展望:現在、開発推進中の自己充填コンクリートを用いたトンネル覆工の自動化『自己充填覆工構築システム』の打設状況確認ツールとして、監視用・測定用ロボットを開発中です。また、観察、監視(カメラ等)、検査、測定(測定器等の搭載)、各種作業(バイブレータ―操作、剥落予防ネット等の設置操作等)のロボット化のため、各用途に応じた走行機仕様の改良に着手しています。さらに現在は、「走行機の自己位置の検出とプログラム走行機能の付加」「現場環境下での動作・耐久性の確認」「使用用途に対応した性能への改良」などの検討を進め、機能追加・改良を行いながら開発を推進しています。今後は、セントル以外の磁性体(鉄骨、鉄塔、鋼製タンク、橋梁など)への用途拡大に向けても開発を進めていきます。
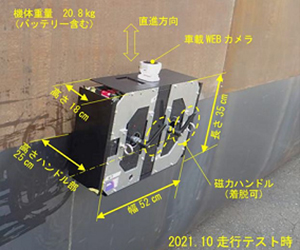
走行機の概要

セントル円周方向走行状況